近日,国际知名期刊《SmartBot》2025年第4期的封面,刊登了段星光教授及其医用机器人与微系统团队的创新研究成果。该成果由珠海校区教师与博士后团队合作完成,标志着校区在智能机器人前沿领域的基础研究取得重要突破,充分彰显了珠海校区在高水平科研创新与跨学科交叉融合方面的强劲实力。

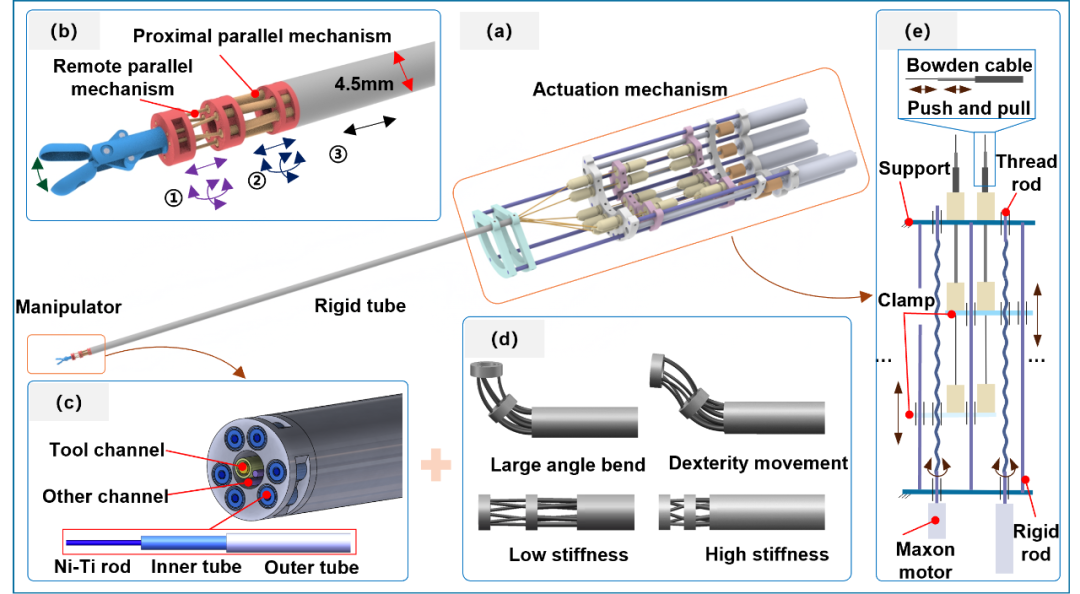
在微创手术领域,器械需穿过狭长通道后,于体内狭小空间内实现灵活、稳定且精准的操作,同时还要在保证执行器小尺寸的前提下,兼顾“柔顺交互”与“刚性操作”的双重手术需求,这是一项持续存在的挑战。本期封面论文题为《Compact Manipulator With Flexible Parallel Mechanisms and Variable Stiffness for Keyhole Procedures》,该研究创新性提出了一款外径仅4.5毫米、具备7个运动自由度和主动刚度调节能力的柔性并联手术执行器,为下一代手术机器人的研发提供了新颖且实用的解决方案。
《SmartBot》期刊是获得“中国科技期刊卓越行动计划”支持的高起点新刊,由Wiley出版集团发行,聚焦智能机器人领域的国际前沿进展。团队研究成果获选封面论文,是国际学术界对该项工作原创性与重要性的高度认可。这一成果的取得,是珠海校区持续营造活跃科研氛围、鼓励原始创新和深度学术交流的体现,也将进一步激励师生在服务国家重大需求与科技前沿探索中贡献力量。